




 商家中心
商家中心
 全部展商分类
全部展商分类
 勘探与生产
勘探与生产


 工程技术服务
工程技术服务






 石油工程建设
石油工程建设
 石油装备制造
石油装备制造







 天然气与管道
天然气与管道 油田数字化
油田数字化
 低碳新能源
低碳新能源

 石油化工产品
石油化工产品 物流运输
物流运输 设备五金
设备五金



正在建设中,敬请期待
نصائح دافئة
Tips
Tips
Please improve your information and become a senior member
نصائح دافئة
Tips


 Trusted stores
Trusted stores
 Direct sales
Direct sales
 Instant prices
Instant prices


 product
Mobile box type grid power system for mechanical drilling rigs
product
Mobile box type grid power system for mechanical drilling rigs  You may also like
You may also like

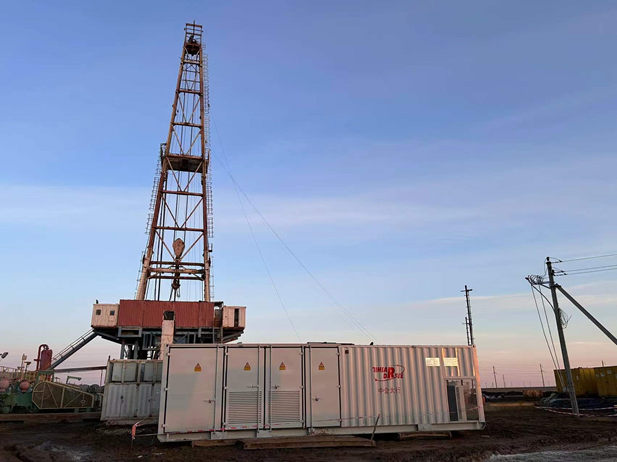

The mobile box type variable frequency
is converted from an input 10KV high voltage switch to a 600V low voltage
through a transformer, and is protected by an incoming circuit breaker for
variable frequency. After passing through the incoming circuit breaker, it
enters the power grid converter and is converted into DC, which is then
converted into vector controlled AC through the motor converter and supplied to
the motor. Electric motors replace diesel engines to drive drilling equipment.
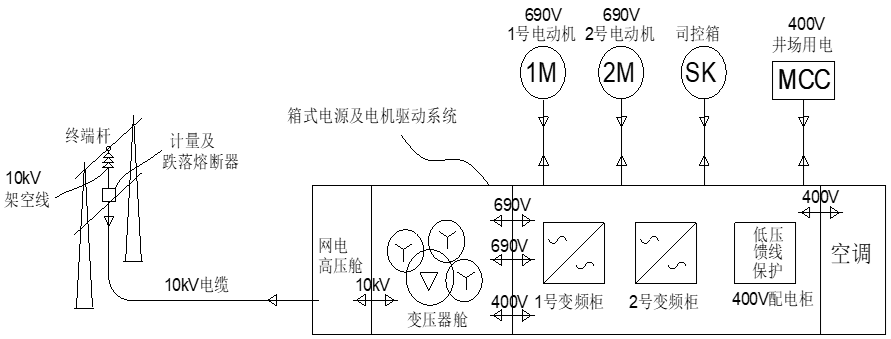
The AC
variable frequency speed control oil to electricity equipment consists of a
grid power inlet compartment, a frequency converter compartment, and an air
conditioning compartment. The internal inlet cabinets, transformers, frequency
converters, distribution cabinets, and air conditioning are all integrated into
a mobile electrical skid. The compartments are connected together through
cables.
|
system parameter |
rated voltage |
600V |
|
rated capacity |
2×1200kW |
|
|
Variable frequency topology |
two-level |
|
|
Efficiency |
≥97%(rated load) |
|
|
input |
AC voltage |
(600±5%)V |
|
Rectification method |
Six pulse rectification |
|
|
dc bus |
Rated DC voltage |
848V |
|
Maximum DC voltage |
1100V |
|
|
output |
Adaptive motor power |
2×1200kW |
|
Output voltage |
0~Uin(Incoming voltage) |
|
|
output current |
1168A continuous operation |
|
|
Frequency |
0~75Hz |
|
|
Overload capacity |
110% rated load 额定负载 rated load 额定负载 rated load |
|
|
Protection function |
Defect protection |
possess |
|
Overvoltage protection |
possess |
|
|
under voltage protection |
possess |
|
|
Overheat protection |
possess |
|
|
overload protection |
possess |
|
|
Overcurrent protection |
possess |
|
|
Short circuit protection |
possess |
|
|
Communication disconnection protection |
possess |
|
|
Motor fault protection |
possess |
|
|
Fast current limiting protection |
possess |
|
|
Operational control characteristics |
Motor control mode |
Vector control |
|
frequency resolution |
Digital setting: 0.1Hz; Simulation setting: 0.1% × Maximum frequency |
|
|
Frequency stability accuracy |
Digital setting: 0.1Hz; Analog setting: ± 0.2% × Maximum frequency |
|
|
Acceleration and deceleration time |
5-3000s arbitrary setting |
|
|
torque characteristic |
Constant torque below fundamental frequency, constant power above fundamental frequency |
|
|
Starting torque characteristics |
Can limit maximum starting torque, adaptive adjustment |
|
|
Operation control mode |
Local control, remote DCS control, remote communication control |
|
|
User DCS interface |
Analog input: (4-20) mA/(0-10) V default 2-way input |
|
|
Relay output: 250Vac/8A, 24Vdc/8A |
||
|
anti-jamming performance |
Design with self disturbance rejection function |
|
|
Other functions |
Automatic current limiting control, overvoltage stall control, automatic voltage adjustment, load change following control functions, etc |



 No Data Available
No Data Available

 share
share

 wechat sharing
wechat sharing

 link sharing
link sharing

 service
service

 top
top
 链接全球
链接全球  精准匹配
精准匹配  在线互动
在线互动  品牌提升
品牌提升  多方共赢
多方共赢  扫码关注公众号
扫码关注公众号  扫码进入移动端
扫码进入移动端 
Tips