

产品
店铺

最近搜过

暂无搜索历史

 商家中心
商家中心
 全部展商分类
全部展商分类
 勘探与生产
勘探与生产








 工程技术服务
工程技术服务






















 石油工程建设
石油工程建设



 石油装备制造
石油装备制造

















 天然气与管道
天然气与管道
 油田数字化
油田数字化
 低碳新能源
低碳新能源

 石油化工产品
石油化工产品

 物流运输
物流运输




 设备五金
设备五金




正在建设中,敬请期待
返回
نصائح دافئة
تحسين المعلومات الشخصية ، وتصبح شخصية عضو كبار الشخصيات ، والتمتع المزيد من حقوق ومصالح الأعضاء ~
ألغى
Tips
Improve personal information, become a personal VIP member, and enjoy more membership benefits~
Cancel
Tips
Only senior members can inquire
Please improve your information and become a senior member
Please improve your information and become a senior member
Cancel
نصائح دافئة
مرحبا بكم في استخدام النفط والغاز مول ، تسجيل الدخول بعد تجربة الخدمة الكاملة ~
سجل
Tips
Welcome to the OilGasExpo. After registering and logging in, you will experience the complete service~
Login

主营地区:
粉丝数量:
 诚信商家
诚信商家
 厂家直营
厂家直营
 实价实销
实价实销



 产品
小修自动化装置
产品
小修自动化装置
:面议
:江苏建湖
收藏产品
 产品推荐
产品推荐
产品详情
产品交流



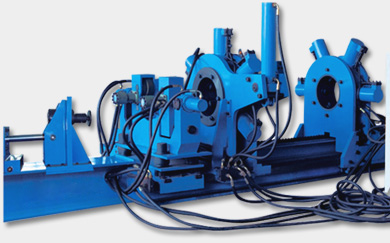

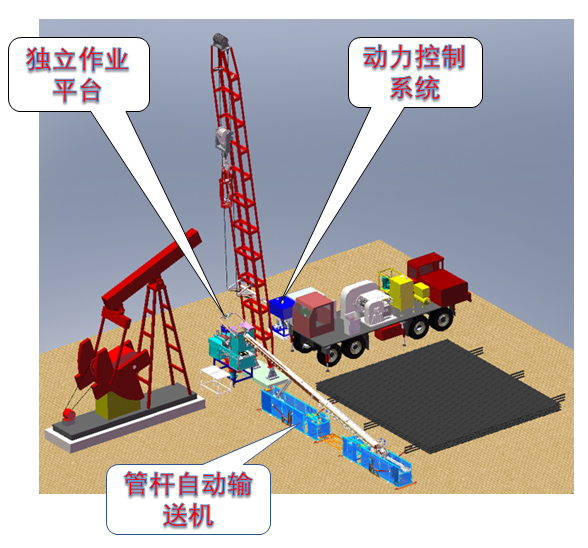
江苏申利达机械制造有限公司生产、吉林油田监制的油井小修自动化作业系统,经现场安装及调试,第一台样机在新民采油厂37-11井成功进行了现场试验。 在试验过程中,各部件控制灵活、动作到位,能够顺利完成起下管作业。 1)、现场操作由3个人协同完成,司钻1人,主要控制大钩上下运动,提升和下放油管;井口工1人,远程控制吊环、吊卡、液压钳、机械手和气动卡盘;场地工1人,远程控制举升机,接送抽油杆及油管。 2)、试验时,起下杆、管单根均能够在2分钟之内完成,与现有作业模式效率提高25%。 3)、作业过程中,极大地改善了工作环境、减轻了劳动强度、降低了安全风险。
1.独立式作业平台
可调节高度,适应不同井口作业;集成动力卡盘、自动液压钳、扶正机械手,整体运输;具备井口废液收集功能,减少作业过程污染。
2. 可翻转式动力吊卡
吊卡口自动开合、吊卡体自动翻转;与气动卡盘互锁,避免误操作。内部可安装抽油杆卡紧补芯,同时适用夹持抽油杆、油管。
3. 偏摆吊环
使吊环具备侧倾功能,方便吊卡挂在抽油杆及油管接箍上。
4. 气动卡盘
气动控制,可实现自动开合卡持井内管柱;替代下吊卡;微痕牙板,减少对油管的损伤。
5. 抽油杆/油管自动液压钳
采取门架式结构,自动前进后退,自动上扣卸扣,自动换挡;安装对中器,避免损坏管杆丝扣。
6. 扶正机械手
起管时将油管送至输送机;下管时从输送机接纳油管,并辅助油管对中。
7. 管杆自动输送机
在整个作业系统中自动卸管,上管,可自动伸缩、举升、翻转,起管、下管动作自如。
8. 动力控制部分
动力系统:安置在输送机上,分别为井口平台和输送机提供动力;
电液控制系统:利用电磁阀和各类液压控制阀是对系统各部件实现集中控制,操控各部件精确动作;各动作均能够实现远程控制



😀
😃
😄
🙂
🤣
😆
😁
😅
🤣
😂
🙃
😉
😇
😊
😕
😟
🙁
😮
😯
😳
🥱
😎
🥰
😍
🤩
😘
😗
😚
😋
😛
😝
🤗
🤭
🤫
🤨
😏
😪
🤤
😺
😸
😹
🙀
😾
🤠
🉑
🧐
💯
💕
💘
💞
🙈
🙉
🙊
🌕
🍁
💌
🤡
💦
💨
💬
🍏
👍
🐦
🦊
🥳
发表
全部评论(0条)
 暂无评论
暂无评论

 分享
分享

 微信分享
微信分享

 链接分享
链接分享

 客服
客服

 返回顶部
返回顶部
温馨提示
您确定要取消收藏该产品吗?
取消
确认
 链接全球
链接全球  精准匹配
精准匹配  在线互动
在线互动  品牌提升
品牌提升  多方共赢
多方共赢  扫码关注公众号
扫码关注公众号  扫码进入移动端
扫码进入移动端 